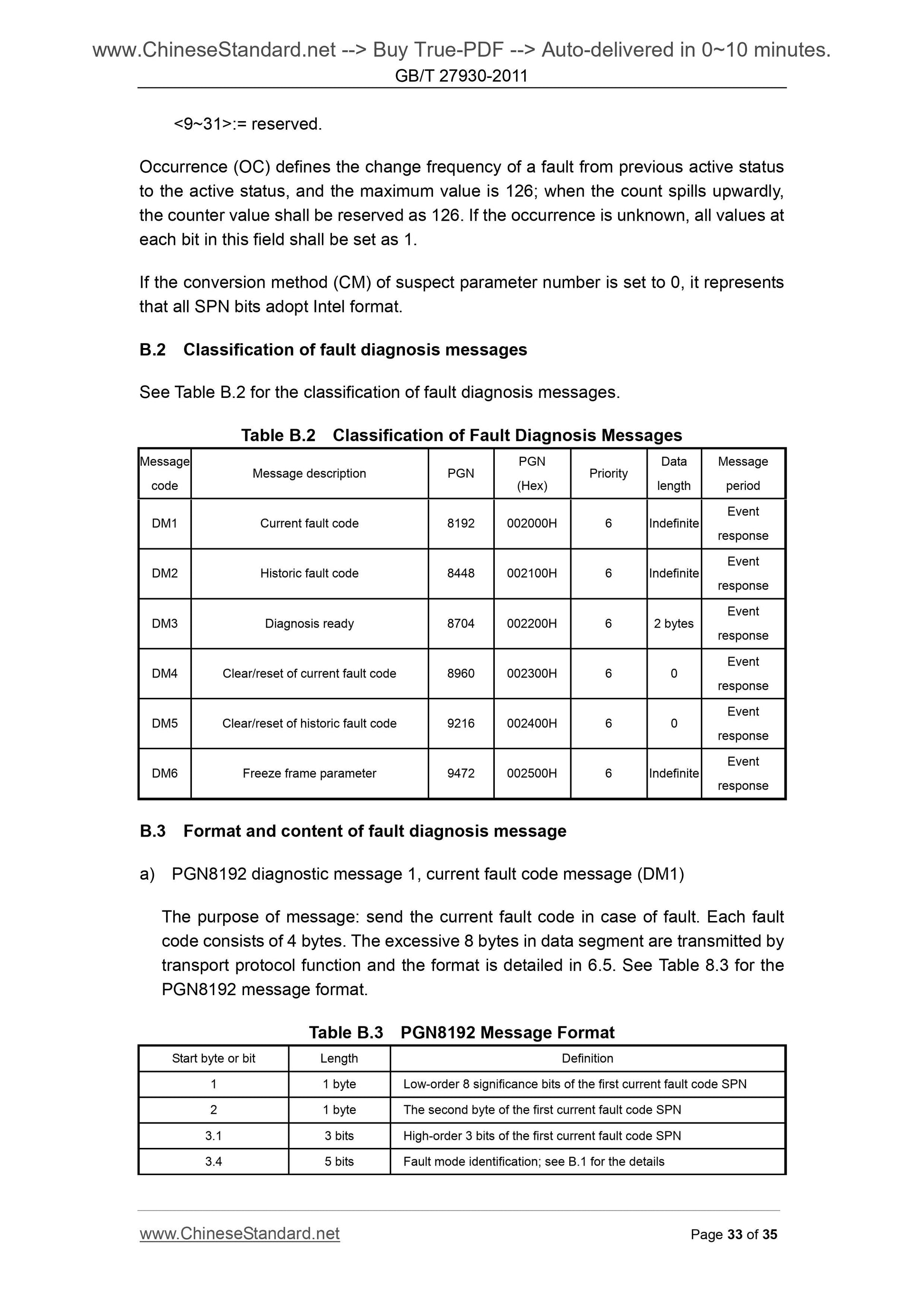
This Standard specifies the definitions of physical layer, data link layer and application layer of the control-area-network (CAN)-based communication between off-board conductive charger (hereinafter referred to as "charger") and battery management system (hereinafter referred to as "BMS") for electric vehicle. This Standard is applicable to the communication protocols between off-board charger and BMS (or other vehicle control units that have charging control function) of electric vehicles that adopt conductive charging mode.
Basic Data
Standard ID
GB/T 27930-2011 (GB/T27930-2011)
Description (Translated English)
Communication protocols between off-board conductive charger and battery management system for electric vehicle
Sector / Industry
National Standard (Recommended)
Classification of Chinese Standard
K81
Classification of International Standard
29.200
Word Count Estimation
29,283
Date of Issue
2011-12-22
Date of Implementation
2012-03-01
Quoted Standard
GB/T 19596; ISO 11898-1-2003; SAE J1939-11-2006; SAE J1939-21-2006; SAE J1939-73-2006
Regulation (derived from)
National Standards Bulletin 2011 No. 21
Issuing agency(ies)
General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China
Summary
This standard specifies the conduction of electric cars off-board charger and battery management system (BMS) between controller-based network (CAN) communication physical layer, data link layer and application layer definitions. This standard is applied for conduction of electric vehicle charging off-board charger with BMS (or with a charge control functions other vehicle control unit) communication protocol between.